
Labor Regelungstechnik
Das Labor zur Lehrveranstaltung Modul BE16 Regelungstechnik der Vertiefungsrichtung Energie Elektronik Umwelt (EEU) findet im 4. bzw. 5.Semester statt und soll den Stoff der zugehörigen Vorlesung durch praktische Anwendung der gelehrten Inhalte vertiefen.
Die typische Vorgehensweise des Regelungstechnikers, nämlich die drei Schritte
- Modellbildung und Identifikation der Regelstrecke („Was soll geregelt werden?“)
- Theoretische Auslegung und Simulation des Regelkreises („Welchen Regler nimmt man und wie stellt man ihn ein?“)
- Praktische Implementierung und der Test des Reglers an der realen Regelstrecke („Funktioniert alles wie berechnet?")
werden den Studierenden in drei aufeinander aufbauenden Versuchen näher gebracht.
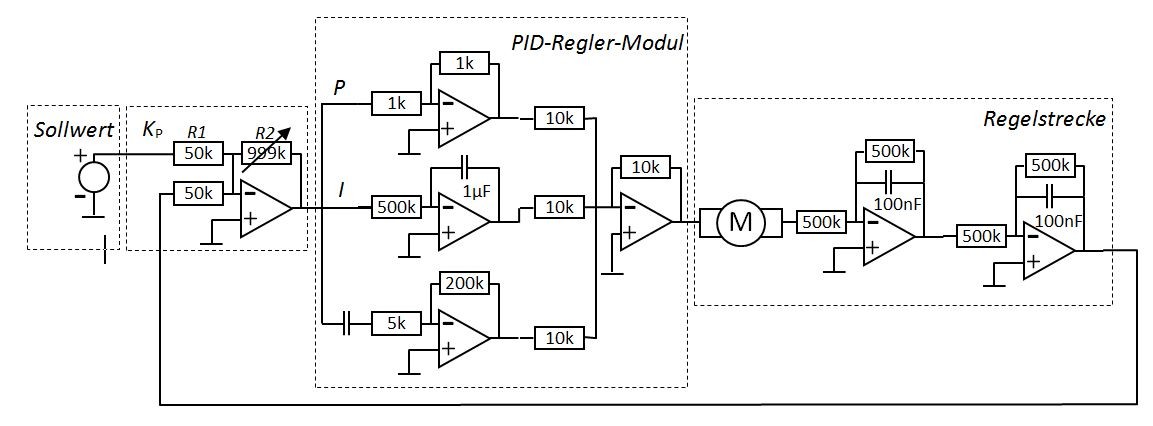
In 3er-Gruppen üben die Studierenden den praktischen Umgang mit einem frei beschaltbaren Experimentiermodell, welches den Studierenden z.T. bereits aus dem Fach Elektronik bekannt ist, und hier um Gleichstrommotor (DC-Motor), Drehzahlmessung und PID-Regler erweitert wird. Ziel des Labor ist es, eine Drehzahlregelung auf der Grundlage von Operationsverstärkern für den DC-Motor zu entwerfen, zu implementieren und zu testen.
Im Einzelnen besteht das Labor aus den folgenden Versuchen:
Versuch 1: Aufbau und Identifikation der Regelstrecke, u.a. :
- Messung der statischen Spannung/Drehzahl-Kennlinie des DC-Motors n = f(U)
- Ermittlung des dynamischen Verhaltens des DC-Motors über:
- Messung von Sprungantworten
- Messung des Frequenzgangs mit Hilfe eines Sinusgenerators
Versuch 2: Reglerentwurf und Simulation
- Auswertung der Messungen von Versuch 1 zur Bestimmung der Parameter der Regelstrecke
- Berechnung der Parameter eines PID-Reglers mit verschiedenen Reglerentwurfsverfahren
- Simulation des geschlossenen Regelkreises mit MATLAB/Simulink
Neben einfachen Einstellregeln für PID-Regler (Ziegler-Nichols, Chien-Hrones-Reswick) kommt hier auch eine numerische Regleroptimierung mit MATLAB/Simulink auf der Grundlage eines quadratischen Gütekriteriums zum Einsatz.
Versuch 3: Implementierung und Test des geschlossenen Regelkreises
- Aufbau des realen Regelkreises samt DC-Motor und PID-Regler mit dem Experimentiermodell
- Messung des dynamischen Verhaltens des geschlossenen Drehzahl-Regelkreises
- Vergleich und Diskussion der Messung mit den Simulationsergebnissen aus Versuch 2